Pour monter un robot suiveur de ligne.

Composants utiliés
- 1 Module suiveur de ligne à infra rouge à 2 canaux (Track Sensor Module)
- 1 carte Arduino Uno
- 1 shield de pilotage de moteurs L293D
- 2 moteurs pour les roues gauche et droite du robot, ou des roues motorisées
- 1 châssis de robot en kitou à fabriquer (en bois, etc.)
- 1 alimentation (pile 9V et boitier)
Principe de fonctionnement

Chacun des deux modules comporte une LED infra-rouge (invisible) pour éclairer le sol et un détecteur de lumière réfléchie qui repère le contraste noir ou blanc.
Une ligne noire correspond à la sortie Low, une ligne blanche correspond à la sortie High.
Le changement de signal permet de repérer qu'on s'est écarté de la ligne à suivre tracée au sol.
Les 2 moteurs du robot corrigent alors la trajectoire du bon côté pour centrer à nouveau la ligne à suivre entre les 2 capteurs.
On accélère la roue extérieure au virage et on ralentit la rotation de la roue intérieure à la courbe à parcourir pour se diriger.
Caractéristiques techniques
Il y a 2 canaux de sortie. Chaque module comporte une LED d'illumination et un détecteur de lumière.
Un potentiomètre incorporé sert à régler le niveau de sensibilité de chaque capteur.
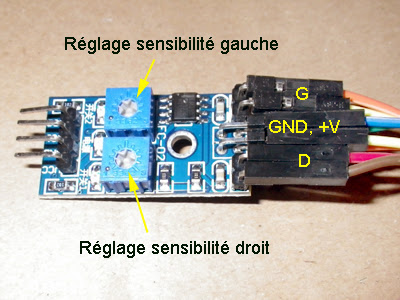
Câblage
Le module déjà assemblé est très simple à câbler.
- V -> Alimentation 5V
- GND -> Masse
- OUT1 = Signal 1, vers une pin digitale de l'Arduino
- OUT2 = Signal 2, idem
- Une LED témoin rouge (centrale) pour indiquer Power On,
- Deux LEDs vertes gauche et droite, s'allument sur le module lors de la détection d'objet réfléchissant.
Réglages de seuil
Deux potentiomètres de réglage à vis sur la platine permettent d'ajuster le seuils.
Dévissé à fond, le capteur détecte en permanence; vissé à fond il ne détecte plus rien, la distance est réglable de 8 à 20 mm environ.
Le module détecte sans difficultés une ligne blanche d'un mm de large sur fond beige (plaque de carton) à 15 mm de distance environ.
Utilisation
Tracer une ligne noire sur fond blanc au sol.
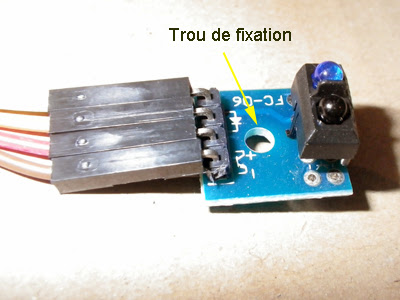
Monter les deux capteurs de part et d'autre de la ligne à suivre sur la châssis du robot (trou de fixation), proches du sol.
Ils sont disposés côte à côte et centrés sur la ligne. On peut les incliner légèrement pour faire converger les zones de détection.
Diminuer le seuil de détection de chaque module séparément (dévisser le potentiomètre), jusqu'à éteindre leurs LEDs témoin de détection sur le fond neutre, et tester la bonne détection dès que la ligne blanche est placée dessous (trait de craie tracé sur un carton marron sombre par exemple).

